Werk 4.0
From conventional production plant to resilient competence plant through Industry 4.0
![]()
What it’s all about
Even now, the economic success of a production facility is heavily dependent on how well it succeeds in representing shorter product life cycles in order to respond more quickly to market and technology changes. The partners in the project “From conventional production plant to resilient competence plant through Industry 4.0 (Plant 4.0)” are working on flexible manufacturing solutions for tomorrow. The aim is to strengthen the capabilities of manufacturing companies in Germany to master the opportunities and challenges of the future. This will also serve as a blueprint for the automotive sector in Germany and other industries. Together with the project partners, technological solutions will be researched and tested. E2E digitization and data flooding as well as a strong focus on the human interface are the cornerstones of this project.
Goals
In the project, a resilient production concept is developed and implemented by integrating innovative technologies. This will enable faster adaptations to unpredictable changes in market and technology requirements and the timely production of the products of the future. Based on various necessary technical innovations, it initially means restructuring. Following the DevOps concept developed in the software industry, the new structure is based on the fact that development, planning, launch and production are no longer organizationally separate, sequential or partially parallelized, but that these functions are jointly designed and responsible from start to finish (E2E). Production becomes more intelligent and acquires the necessary competence to introduce and implement changes itself on the basis of its current status and thus to respond better to external influences.
Motivation
The automotive industry is in a state of flux. Electrification and digitalization are fundamentally changing it. Consequently, the global production network of Mercedes-Benz with all its vehicle and drive factories is also changing. Motivated by this, the project deals with a future production system for the German luxury car manufacturer. The project is being carried out in conjunction with other companies undergoing transformation.
Research and development project “Werk 4.0”
- Project launch: January 2023
- Funding amount: 24,3 million EUR
- Number of partners: 12
- https://wvsc.berlin/en/projekt/werk4-0
This project is funded by the German Federal Ministry of Economics and Climate Protection (BMWK) in the funding guideline “Digitalization of Vehicle Manufacturers and Supplier Industry” in the funding framework “Future Investments Vehicle Manufacturers and Supplier Industry” and is supervised by the project sponsor VDI Technologiezentrum GmbH.
![]()
![]()
Innovations for the production, services and work of tomorrow
Development and validation of an evolutionary, human-centric framework for change-competent organizations

Motivation
Every organization is under pressure to change – and the pace is increasing always on. “Change competence” now plays a key role for the success of companies. The tasks that they have to master for this lie in many areas: It’s about work psychology and human-machine interaction, it needs social and technical solutions. Now studying a unique project models from research and practice for how change can succeed.
Goals
A supply chain suddenly looks completely different than before. A team wants more task rotation. An employee uses AR glasses for the first time, that work environment enriched with information: There are many changes in organizations faces. How do companies and people cope with this? Which framework conditions are needed to make change productive? Research that now the project “Development and Validation of an Evolutionary, Human-Centered Frameworks for change-competent organizations (EvoFrame)” is performing. 14 partners from science and business are working together in an interdisciplinary manner. Basis are the hypotheses of the “Industry 4.0” platform. Even if the will to change is there, the question arises: How does it succeed? The approaches to this have so far been as dissimilar as the organizations that use them in individual try transformation projects. There is a lack of reliable, general and good proven models for a successful “evolution”.
Innovations and Perspectives
with the start of the EvoFrame research project in January 2023, a change started: Knowledge becomes more extensive. EvoFrame combined experiences from the production environment with occupational medical, sociological and psychological insights into human-machine interaction. The project partners develop and test based on selected use cases a framework that recognizes the adaptability of companies and their promotes employees and anchors change directly in the corporate culture. This framework maps the organization and its procedures as models. It will be like this possible to redeploy resources and employees fluidly in order to to facilitate change processes. A guide will provide the framework for Summarize change competence in such a way that it is shared by companies across the board can be applied.
Research and development project “EvoFrame”
- Project launch: January 2023
- Funding amount: 2.999 million EUR
- Number of partners: 14
- https://wvsc.berlin/projekt/evoframe/
![]()
AI for efficient, industrial HRC applications
Research and development project for the easy transfer of AI methods into practice of SMEs
Motivation
Modern robots can work with people in logistics and production without safety fences. Human-robot collaboration (HRC) follows strict standards and rules to ensure human safety at all times. As a result, HRC systems typically operate at low, reduced speeds or even stop when a person approaches the robot.
Goals
The aim of this project is to develop a prediction of how a person will move in the workspace. For this purpose, the common work area is converted into a representation with which obstacles can be represented as volumes. Human poses are preprocessed with auto encoders (artificial, neural networks). A second auto encoder is trained on the basis of public movement databases and thus enables the prediction of individual movements of people. In the final step, a neural network trained with just a small amount of task-specific data can predict complex human actions. The motion prediction is evaluated in two different demonstrators. One demonstrator is the mobile HRC cell, which is a typical application in a logistic scenario. The other demonstrator is a service robot that represents a service robotics scenario.
Innovations and Perspectives
The “AI-in-the-box” solution reduces the transfer hurdle between research and real collaborative human-robot applications in industry and in service robotics. The “AI-in-the-Box” is an Add-on solution that can be used quickly in practice. This enables SMEs in particular easy access to AI methods and helps to strengthen their competitiveness.
Research and development project “KI4MRK”
- Project launch: April 2020
- Funding amount: 0.867 million EUR
- Number of partners: 4
- https://www.softwaresysteme.pt-dlr.de/de/ki-in-der-praxis.php
![]()
Robotics for Care
Research and development project for the use of service robots in care
Motivation
Due to demographic change, fewer and fewer care staff are faced with a growing number of people in need of care. The consequences are excessive demands, a decrease in the quality of care, and dissatisfaction of all. Service robots have the potential to take over routine care tasks if they really help to relieve the strain and are accepted as support.
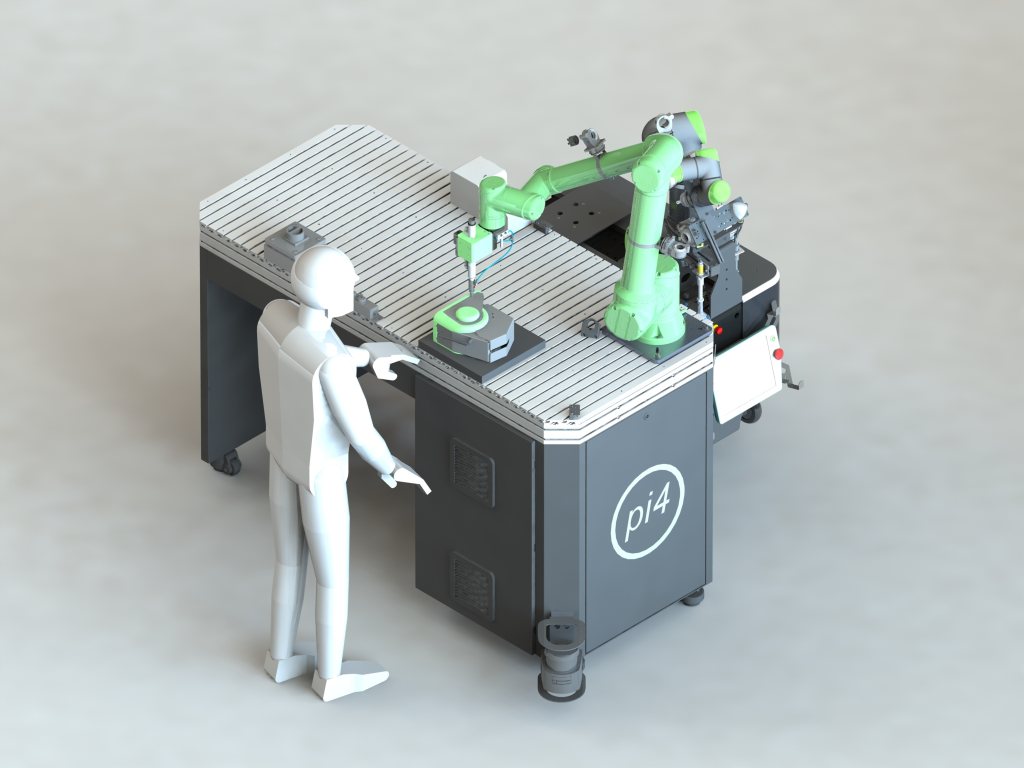
Goals
The aim of the project is to qualify the Service Robot Workerbot4 of pi4 for care tasks. With the involvement of the care staff and those in need of care, the work processes in daily care are examined. In addition, trust-building features of the robot are investigated and ethical questions and requirements for data protection are discussed and taken into account. The results are implemented functionally and creatively in the service robot and tested in care practice.
Innovations and Perspectives
The combination of the confidence-building design of the robot and technological improvements promotes the use and acceptance of supporting robots in care practice. This will reduce the workload for the care staff and increase the quality of care.
Research and development project “RoMi”
- Project launch: March 2020
- Funding amount: 1.49 million EUR
- Number of partners: 5
- https://www.romi-projekt.de
- https://www.interaktive-technologien.de/projekte/romi
![]()
Physical human-robot interaction for a self-determined life
Research and development project for robot basic skills with or without direct physical contact to humans

Motivation
People with multiple physical limitations e.g. severely paraplegics need help in everyday life and with food and drink intake. Supporting robots that have interactive basic skills (e.g. handouts and communication with people) can offer completely new possibilities.
Goals
The aim of the MobILe project is to research and implement basic skills with and without direct physical contact between humans and robots. To control the robot in a three-dimensional space, the person uses head and eye movements that are recorded via a headset with motion sensors or glasses with an eye tracker and electrooculography. Augmented Reality (AR) is used for the interaction of the robot with humans, e.g. in the form of visual representations of the intended actions of the robot. The user-centered interaction design minimizes loss of attention. A safety system with redundancies ensures functional reliability. In the case of the basic skills with direct physical contact, new control strategies are used, which ensure that the interaction is carried out until a clear cancellation command is issued.
Innovations and Perspectives
The knowledge and developments of the MobILe project will enable support services for robots with direct physical contact between humans and robots in the future. The research results can be transferred to other basic robotic skills as well as to collaborative human-robot applications in industry.
Research and development project “MobILe”
- Project period: Juli 2017 - June 2021
- Funding amount: 1.98 million EUR
- Number of partners: 5
- https://www.interaktive-technologien.de/projekte/mobile
![]()
Electrical Drives
Research Project Change in production technology
The electric motor as a converter from electrical to mechanical energy is at the centre of the electric drive. The electric drive can be found in industrial applications in a wide range of sectors (metal, industry, mining, energy, marine/shipbuilding, oil & gas). Advantages of the electric drive are: environmental friendliness, good transportability of the necessary energy even over long distances, good efficiency in converting electrical to mechanical energy, as well as high availability.

Goals of the research project
The “Electric Drives” research project aims to develop the competitive electric machine of the future. The research results are to be applied to related areas, such as railway drives.
Motivation
Electric drive is already widely used today. Due to climate change, its importance continues to increase. Classic combustion engines are being replaced by electric drives. In addition to availability and efficiency, the higher power density (power/input mass) is one of the central requirements for the development of new electric machines. The realization of these requirements and fast delivery times in international competition are growing challenges for classic production sites. To remain competitive, disruptive approaches must therefore be found to design and manufacture electric machines from scratch. Digitization offers enormous opportunities in this aspect.
Electrical Drives • Research project for Change in Production Technology
- Project launch July 2020 • Funding amount: 10.1 million EUR • Number of partners: 16 • Main location, Rohrdamm 88, D-13629 Berlin
- https://wvsc.berlin/forschungsprojekt-elektrische-antriebe

Robotics for logistics
Development of a Smart Logistic Robot (SLR) for the industrial automotive sector
Motivation
Transporting workpieces or tools is a challenge for automation. Rigid solutions, such as conveyor belts, are very fast, but are not suitable for flexible production processes or for small quantities.
Goals
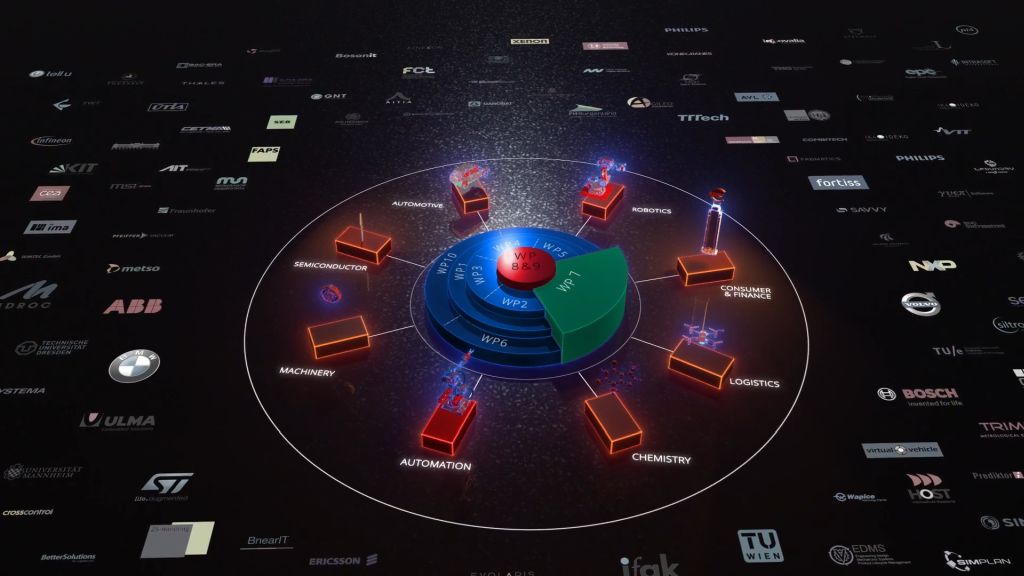
The aim of the project is to have transport tasks in a production facility performed by a mobile robot. For this purpose, a connection between mobile robotics and lightweight robotics is created. In order for this robot system to be able to work independently of additional auxiliary equipment, it should be able to use its own tools such as a articulated robot arm, 3D camera and gripper changer in addition to its free mobility.
Innovations and Perspectives
The combination of mobile robot and industrial lightweight robot creates completely new use cases and enables new areas to be opened up and new tasks to be automated.
Research and development project “Productive4.0”
- Project launch: May 2017
- Funding amount: 106 million EUR
- Number of partners: 109
- Productive 4.0
- Video 1
![]()
PickClothBot
Automatic sorting of soiled laundry
Motivation
In industrial laundries, the dirty personal laundry from nursing homes or hospitals is sorted by hand according to the various laundry criteria and then washed. Since this laundry can also be heavily contaminated, there is a risk here for the employees in the laundry.
Goals
The aim of the project is to have robots sort dirty laundry according to washing criteria. The robots recognize laundry by means of image processing and then read out the stored information on the washing criteria by sensor. The laundry sorting can thus take place without employees coming into contact with dirty laundry.
Innovations and Perspectives
The automatic sorting of laundry contributes to occupational safety and relieves employees of this task. Since robot-assisted sorting can also take place 24/7, it also offers economic advantages.
Research and development project “PickClothBot”
- Project launch: January 2017
- Number of partners: 3
![]()